Music moves us, not just metaphorically, but also through the body. The project investigates the role of motion in composition and performance of music, and the way movement carries meaning and becomes gesture, which shapes our understanding of music. In music and performance research, the focus has shifted away from the score towards the body. Psychology of music is investigating how physical movement influences our perception of music.
more…
Music Means Movement – Musings on Methods for Movement Analysis in Music
This article addresses the intersection of technical, analytical and artistic approaches to perceiving and measuring musical movement. The point of view taken is situated between the development and application of technological tools, the design and running of exploratory experiments, and the musical performance moment, where perception of the body and its movements constitutes an integral part of the experience. Through a use-case that is shared with other artists and researchers, a wide range of necessary developments, both conceptually and in software is shown. The tools and the methods generated are juxtaposed with the realisation that movement analysis is merely one possible usage of acquired data. Artistic translations provide alternate ways of generating meaning from movement data, in particular when translating musical actions to pieces that span multiple modalities. With the proposed multi-perspective methodology, ways and means are sketched out that address the inherent multiplicity of domains involved in music performance and perception.
more…
Moving Music – Exploring Movement–to–Sound Relationships
Relating movement to sound in an artistic context demands an understanding of the foundations of perception of both do- mains and the elaboration of techniques that effectively creates a link with technical means from body to sound. This article explores the strategies necessary in interactive dance work to successfully link movement to sound processes. This is done by reducing the dimensions of the observed elements to the fundamentals and at the same time identifying target dimensions that allow the recreation of an equivalent expression. A categorisation helps to elucidate those elements and characteristics that can be applied and looks at how they are perceived by the audience. The asymmetry that arises when using technical links to generate sound in interactive dance poses the question of dependency and exposes limits and challenges of using technology in this performing arts practice.
more…
Skill Development and Stabilisation of Expertise for Electronic Music Performance
Skill development, the stabilisation of expertise through practise, and processes of bodily as well as neural sharing in the context of gesture-based electronic music performance are the topic of this article. The key questions centre around the affective, embodied but also neurological aspects of these processes. The types of awareness on a corporeal level and the neural processes that occur within the musician and the listener-viewer are investigated, since in music performance the perceptions of musician and audience depend on shared embodiment and cognitive processes. The aim is to show that ‘enactive’, embodied concepts merely provide a different perspective of the same complex matter than what the cognitive neurosciences propose. A concrete musical piece is used as an example that shows a gestural practice using sensor- based instruments and digital sound processing in order to expose the critical relationships between musician, instrument, technology and the audience. The insights arising from blending the two complementary perspectives in this context can be productive both for artistic practice as well as systematic research in music.
more…
Exploring Gesturality in Music Performance
Perception of gesturality in music performance is a multi-modal phenomenon and is carried by the differentiation of salient features in movement as well as sound. In a mix of quantitative and qualitative methods we collect sound and motion data, Laban effort qualifiers, and in a survey with selected participants subjective ratings and categorisations. The analysis aims at uncovering correspondences in the multi-modal information, using comparative processes to find similarity/differences in movement, sound as well categorical data. The resulting insights aim primarily at developing tools for automated gestural analysis that can be used both for musical research and to control interactive systems in live performance.
more…
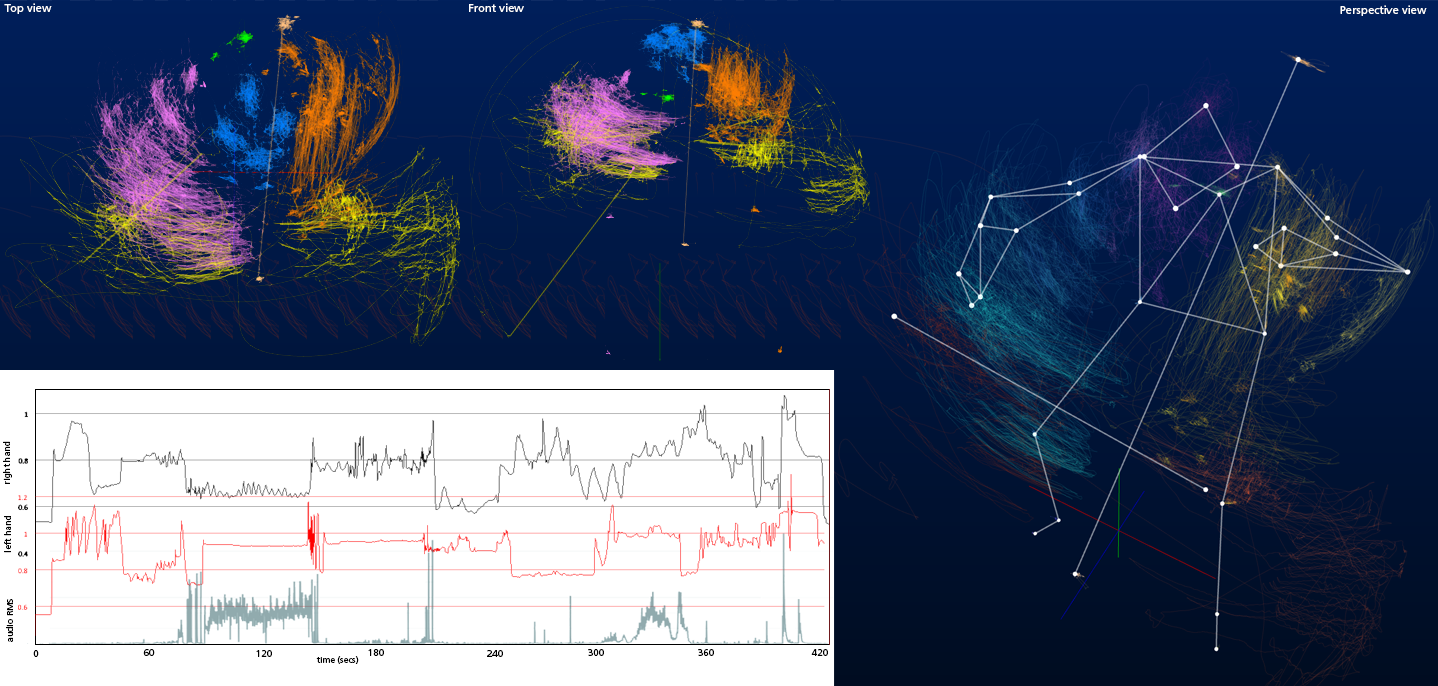
Moving Through the Double Vortex – Exploring Corporeality In and Through Performance Creation
Music, when performed live, carries the musician’s physicality with it, either embedded within the sound or perceivable through the musician’s physical presence. A dancer’s movement follows dynamics and expresses shapes that are based on musical phrasing principles and ‘kinetic melodies’. The two pieces ‘Double Vortex’ for trombone, movement, and live-electronics and ‘Moving Music’ for interactive dance and electronic sounds represent experimental devices for exploring the relationships between musical actions and movement, sound and space, and between instrumental and embodied performance modes. With physical tasks and movement components added to open-form, improvised, and compositional work, the otherwise tacit and taken for granted contributions of the performer’s corporeal presence is brought to the foreground. By putting the dancer into the role of an instrumentalist and by setting the trombone player into movement, the intrinsic musicality of movement and the dependence between dance and music is shown. By linking sound and movement in both the corporeal and the technological domains, a shifted relationship is established that generates forms of interaction particular to this specific practice. The work on the two pieces is carried out with a focus on artistic creation, and in parallel becomes the object for observation, trace interpretation, and analysis from the perspective of art as research. The exposition further thematises the methods of trace collection and analysis, as well as the making of maps, diagrams, and assemblages, and addresses the scope of this secondary discursive format. In a movement that goes from media trace to text to sketch, from descriptive to contextual to associative juxtaposition, the exposition speculates about – rather than claims to generate – insights and understanding on corporeality in technologically mediated music and dance performances.
more…